In this article, I am going to write about the Sliding Mode Control (SMC) algorithm.
Sliding Mode Control algorithm is a robust controller for nonlinear systems.
Robust control means that even though the system model has a certain error, if the controller can control the system, we say that the controller is robust.
SMC has two fundamental ideas.
1. To attract the system states to the surface.
2. To make the state slide on the surface toward the origin.
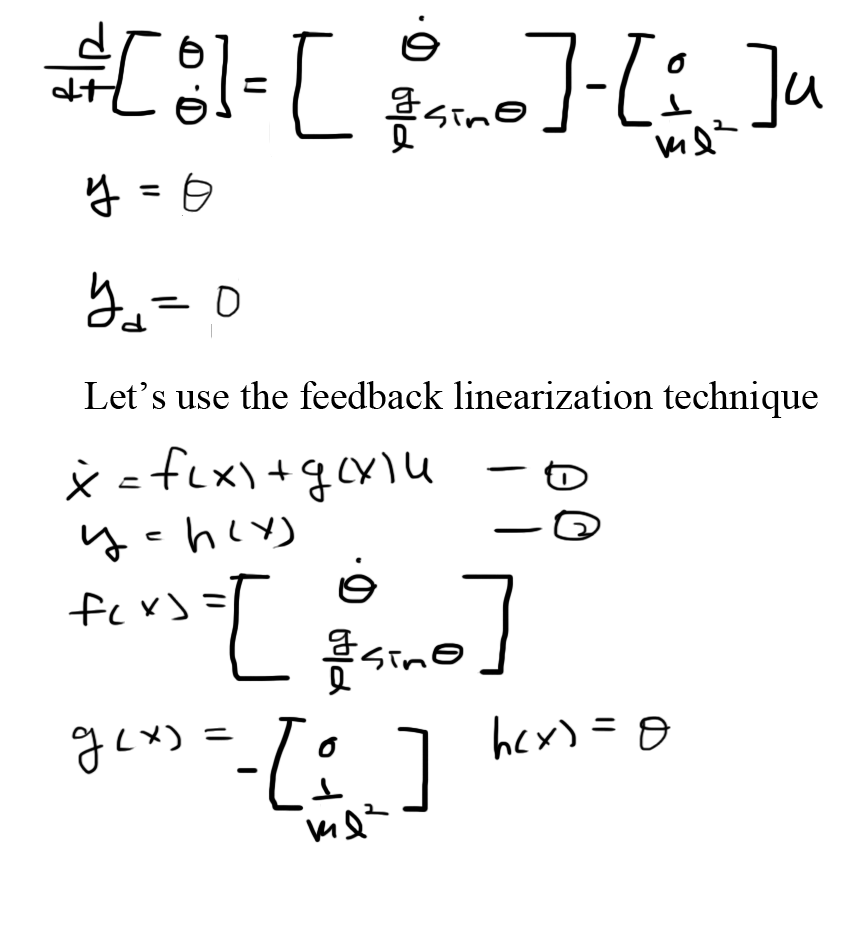
To explain the above two ideas more easily, let’s assume a typical control problem.
) — (1)
— (1)
&space;+&space;u)
 — (2) if it is nonlinear, you need to know Lie Derivatives.
— (2) if it is nonlinear, you need to know Lie Derivatives.
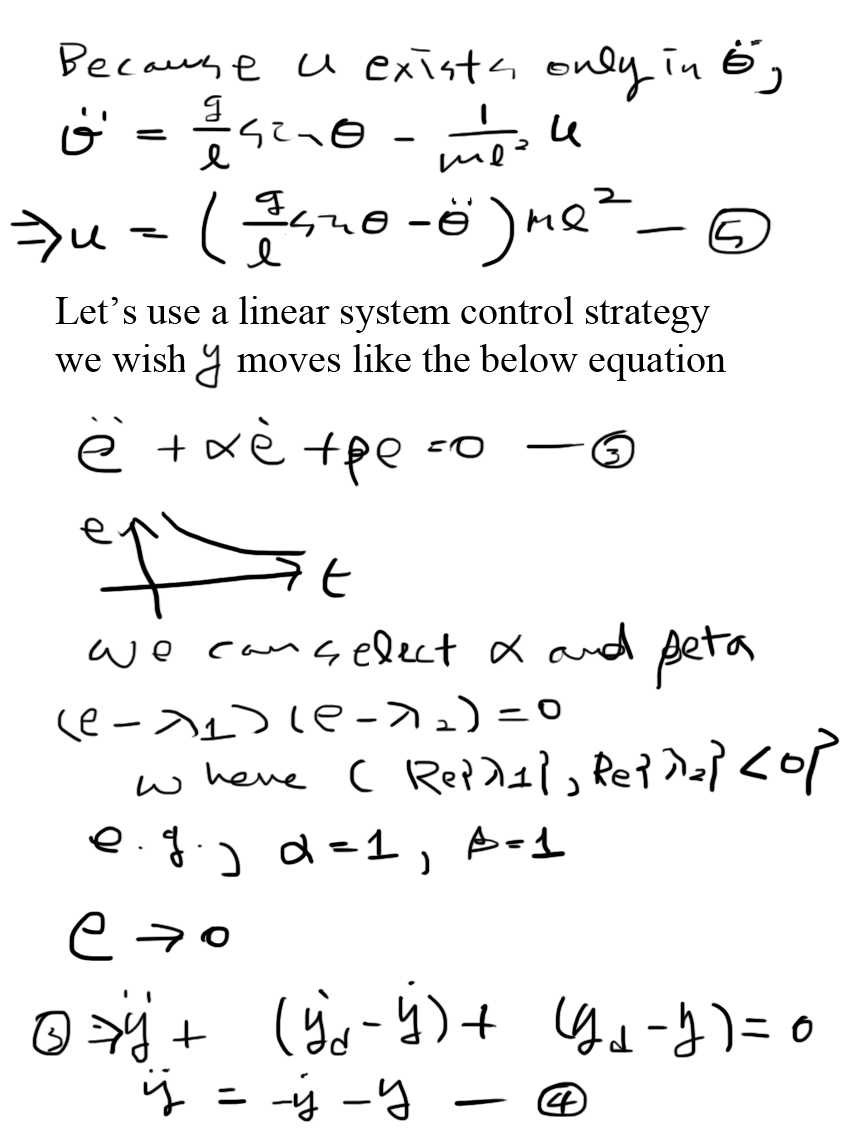
To achieve the first idea, we need to define a surface like the below. (Let’s assume that  is a scalar and differentiable.)
is a scalar and differentiable.)
=a_0&space;e&space;+&space;a_1&space;\dot{e}) where
where  — (3)
— (3)
Here we need to select a_0 and a_1 to make y->0 as t-> inf,s=0. You will see the reason after more several lines.
Let’s take the derivative of s(x) w.r.t. x. Then we can get the below equation.
=a_0&space;\dot&space;e&space;+&space;a_1&space;\ddot&space;e) — (4)
— (4)
In addition, if we add the additional term –) we can obtain the below equation,
we can obtain the below equation,
=a_0&space;\dot&space;e&space;+&space;a_1&space;\ddot&space;e=-\eta&space;\text{sign}(s)) — (5)
— (5)
Through a simple Lyapunov theorem, we can easily prove s-> 0 at t->inf .
if s=0, e-> 0 and \dot(e)-> 0, because we selected a_0 and a_1 to be like this.
Let’s look at (5),
+a_1&space;\frac{d^2}{dt^2}(y-y_d)=-\eta&space;\text{sign}(s))
=> =-\eta&space;\text{sign}(s))
=>))=-\eta&space;\text{sign}(s))
=>)/C&space;-&space;a_0&space;f_1)/a_1&space;-f_2)
With this control input, we can control a nonlinear system with SMC.
it is difficult to explain quickly within short explanations…., if you need more explanation or questions, please leave me a reply.
Like this:
Like Loading...