——————————————————————————————————————————–
Herman (who commented for this posting) told me that there are two different versions of ELO. One is just to linearize a nonlinear function (this posting will handle it), and the other is using Lie-algebraic approach (refer to M. Zeitz 1987 “The extended Luenberger Observer”).
Thank you Herman.
——————————————————————————————————————————–
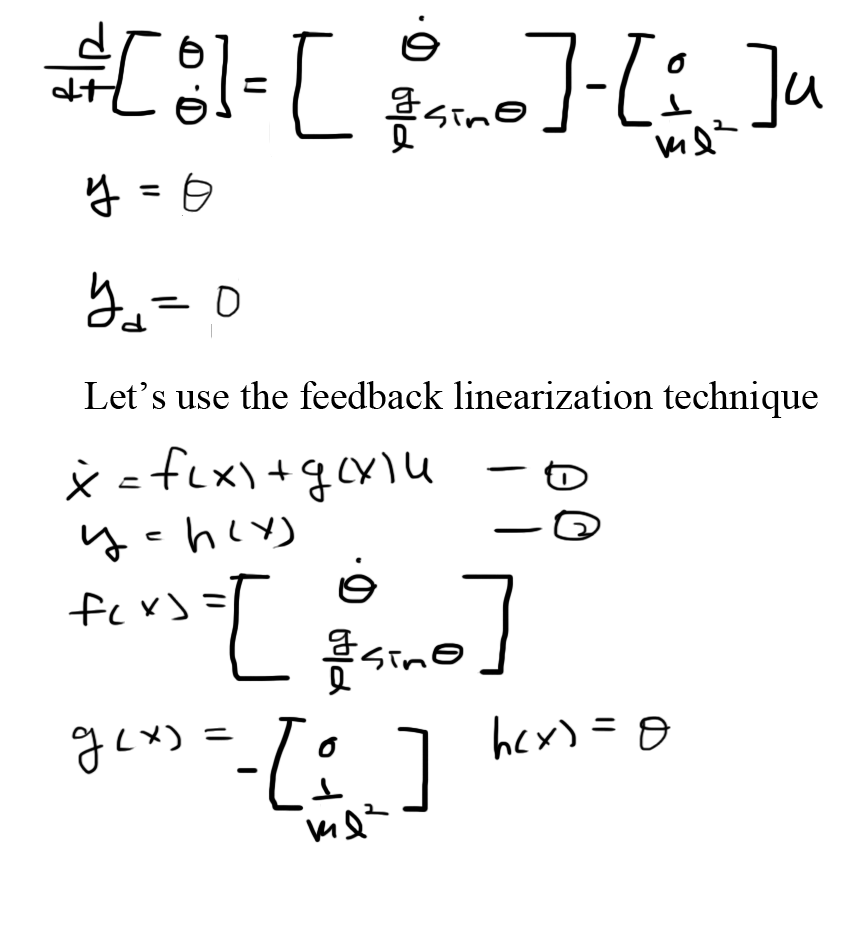
This article is to explain the use of Luenberger observer for nonlinear system control. In other words, it is Extended Luenberger Observer, (ELO, just like Kalman Filter (KF), and Extended KF).
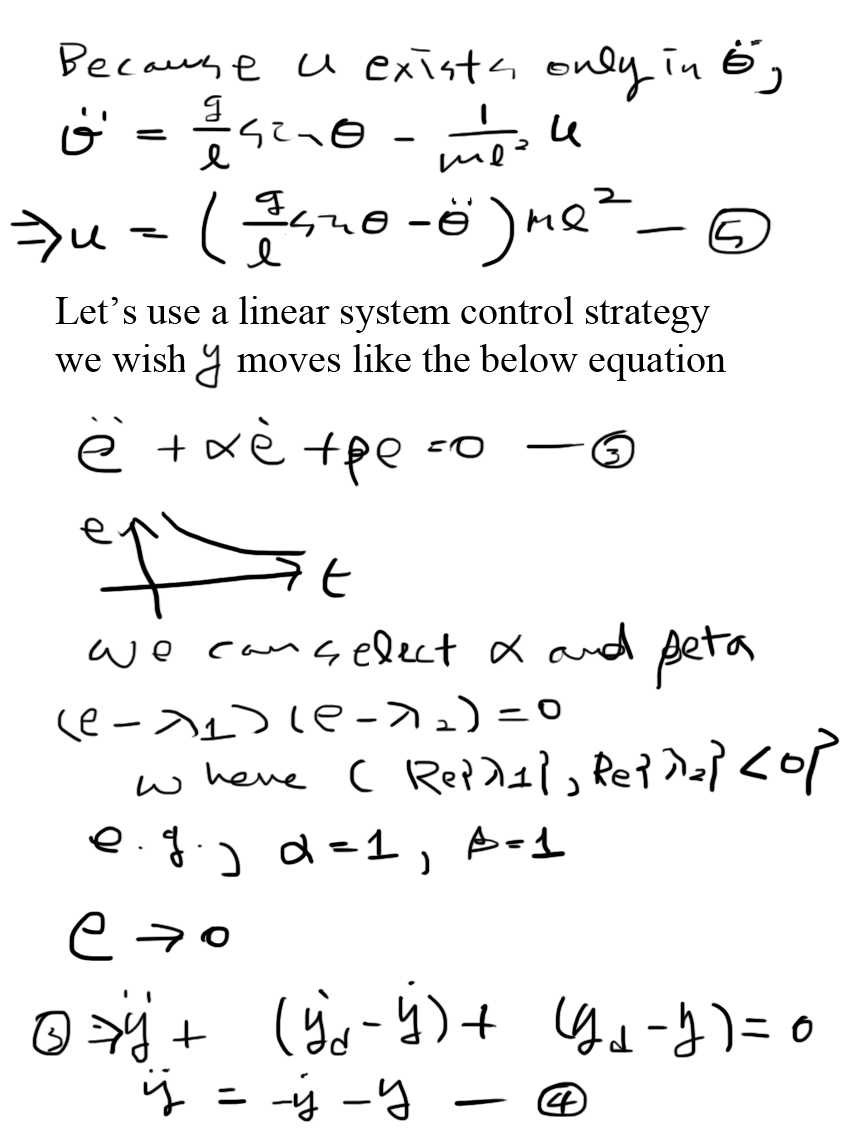
The basic idea is to linearize nonlinear system around the interesting point. The below is the description of ELO and how to select gain values for Extended Luenberger Observer. The below description assumes that you already know about Luenberger Observer for linear system. If you don’t know visit here.


I wish this can help your understanding about Luenberger observer, if you have any question, please leave me a comment below.
—————————————————————————————————————————–
I am Youngmok Yun, and writing about robotics theories and my research.
My main site is http://youngmok.com, and Korean ver. is http://yunyoungmok.tistory.com.
—————————