Phase plain analysis is a useful visualization tool to understand the characteristics of systems including not only linear system but also nonlinear system. For example, we can determine stability of the system from this phase plane analysis.
The attachment file <here> is Matlab toolbox to draw phase plain. The attached file includes a simple demo and the below is the result. You can draw phase plane, magnify where you are interest recursively. You can see how to use the Matlab code in the following Youtube video.

How to draw?
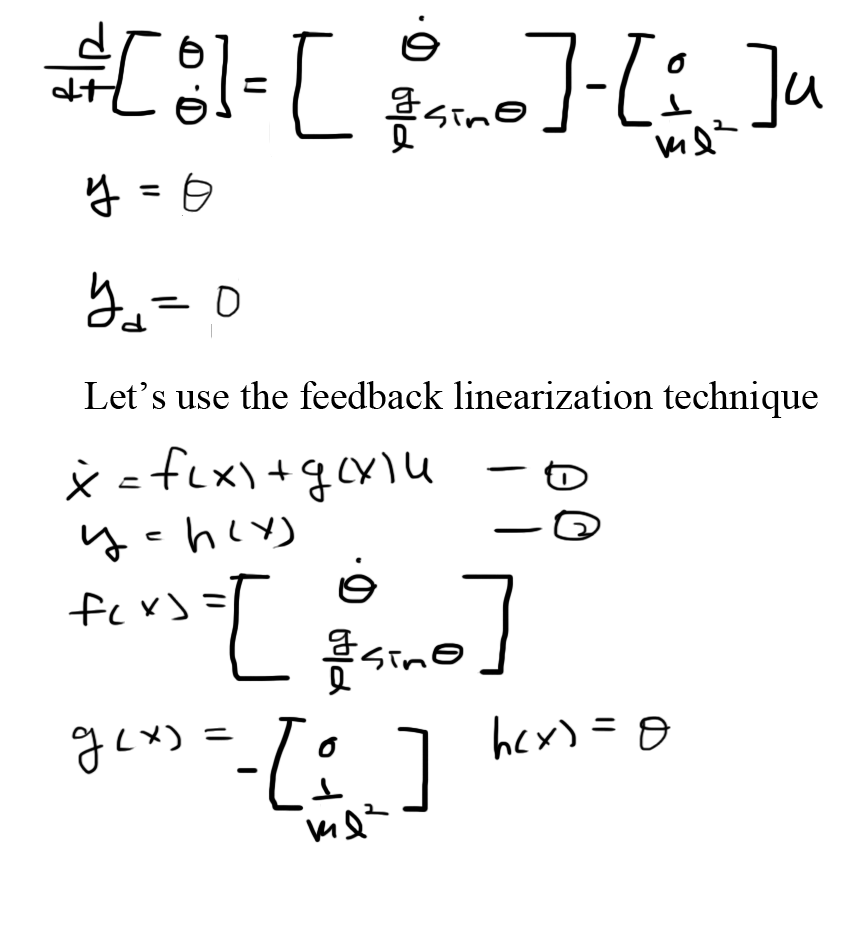
Given,
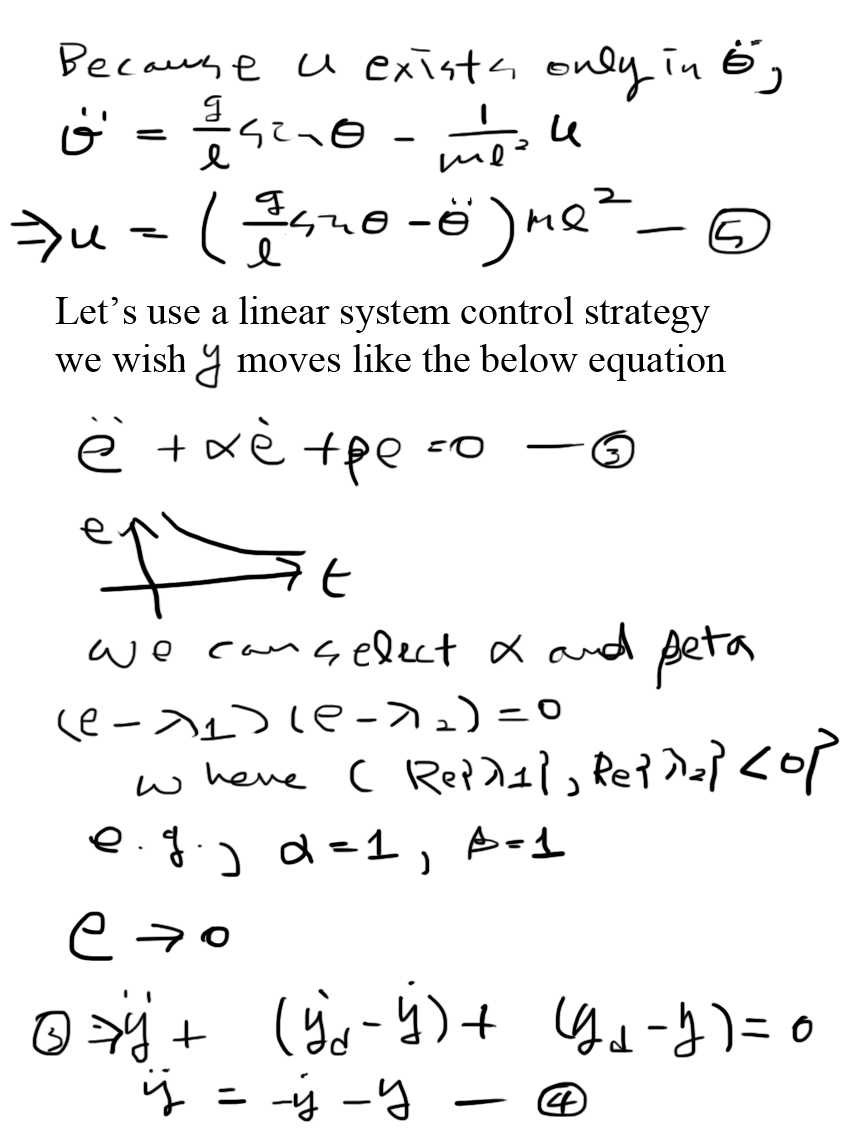
we can find the below equation
From , we can find the direction of the phase change at the point of
.
Advantage:
- It is an exact method. We can see the change of system’s state including transient response.
- Simple graphical method. It is very intuitive and easy to understand its characteristics.
Limit:
- Limited to the 2nd order system. It is expandable, but hard to visualize.
Reference
1. Lecture of Prof. Fernadez in Mech. Eng, The Univ. of Texas at Austin.