>> 3D Environment Reconstruction & 3D SLAM based on Plane Feature
– Period : September, 2010 ~ 2012
– Co-research with Prof. Nakju Doh, and Sooyong Yeon, Robotics Lab., Korea University
– Feature-based 3D SLAM(Simultaneous Localization and Mapping) algorithms can overcome weak points of non-feature-based (point-based) 3D SLAM algorithm such as ICP. Plane feature-based 3D SLAM approach manages map with plane features, which enables 3D SLAM at large-scale environment in real time.







* click to see a large picture
– Related Papers:
Sooyong Yeon, Changhyun Jun, Hyunga Choi, Jaehyeon Kang, Youngmok Yun, and Nakju Lett Doh, “Robust-PCA based Hierarchical Plane Extraction for the Application of Geometric 3D SLAM,” Industrial Robot, in Press
– Period : July, 2011 ~
– Project of Agency for Defense Development(ADD), directed by Dr. Changhwan Kim, Korea Institute of Science and Technology(KIST)
– The goal of this project is first to control outdoor multi-robot with particular formations. Additionally, this control algorithm will be fused with other various applications such as surveillance, and invader searching.


YouTube 동영상
YouTube 동영상
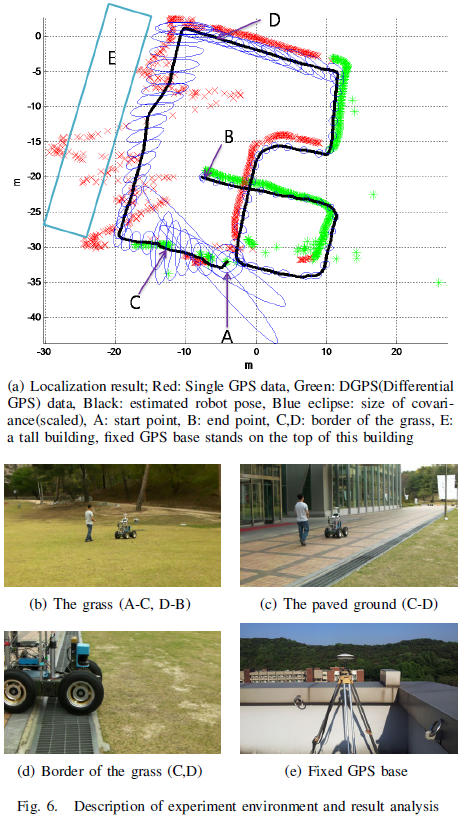
>> Outdoor Localization with Optical Navigation Sensor, IMU and GPS
Autonomous outdoor navigation algorithms are required in various military and industry fields. A stable and robust outdoor localization algorithm is critical to successful outdoor
navigation. However, unpredictable external effects and interruption of the GPS signal cause difficulties in outdoor localization. To address this issue, first we devised a new optical navigation
sensor that measures a mobile robot’s transverse distance without being subjected to external influence. Next, using the optical navigation sensor, a novel localization algorithm is established with Inertial-Measurement-Unit (IMU) and GPS. The algorithm is verified in an urban environment where the GPS signal is frequently interrupted and rough ground surfaces provide serious disturbances.

– Related Papers:
Youngmok Yun, Jingfu Jin, Namhoon Kim, Jeongyeon Yoon, and Changhwan Kim, “Outdoor localization with optical navigation sensor, IMU and GPS,” Int. Conf. on Multisensor Fusion and Integration for Intelligent Systems (MFI), pp. 377-382. IEEE, 2012.
>> Mechatronic System Design and Control for Automobile System Validation
– Period : April, 2008 ~ June, 2011
– Assistant Researcher, Renault-Samsung Motors Technical Center
– As a military service, for three years, I had worked at the Renault-Samsung Motors Technical Center. Main tasks were mechatronic system design and control for validation of automobile chassis system. Through these experience, I could learn about the practical design sense of mechanical and electronic system. Additionally, global cooperation with world-wide coworkers and participation to several huge-scale automobile projects were another pleasure.

< Acc., Brake, Clutch Pedal & Parking Brake Durability Test Bench >
>> Odometry Calibration of Mobile Robot using Home-positioning
– Period : 2007

– Related Papers:
– Youngmok Yun, Byungjae Park, and Wan Kyun Chung, “Odometry Calibration using Home Positioning Function for Mobile Robot,” IEEE Int. Conf. on Robotics and Automation (ICRA), 2008.
– Sharifuddin Mondal, Youngmok Yun, and Wan Kyun Chung, “Terminal Iterative Learning Control for Calibrating Systematic Odometry Errors in Mobile Robots,” IEEE/ASME Int. Conf. on Advanced Intelligent Mechatronics (AIM), 2010.
– Youngmok Yun, Wan Kyun Chung, and Sang yep Nam, “Systematic Error Calibration of Mobile Robot using Home Positioning Function,” IEEE Int. Conf. on Ubiquitous Robots and Ambient Intelligence (URAI), 2008.
>> Development of Navigation and Human-robot Interaction Techniques
SLAM movie clip, Robotics Lab, POSTECH
>> Tennis ball gathering robot using visual recognition

