This article explains about Feedback linearization control (FBL) method for control of a nonlinear system. By demonstrating a control strategy of the inverted pendulum problem, I am going to explain how to implement its algorithm into a real system. The basic idea is that we can cancel control input by manipulating control input. The below is its practical implementation method and example.
If you want to know the proof of feedback linearization control method. refer this.

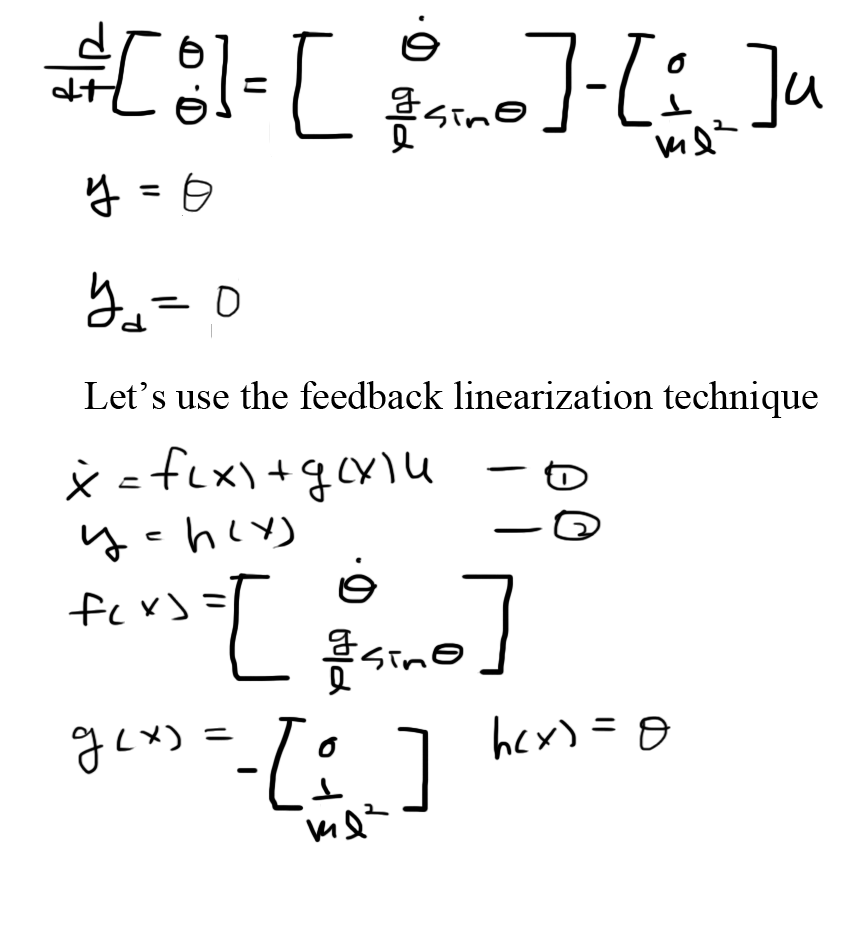
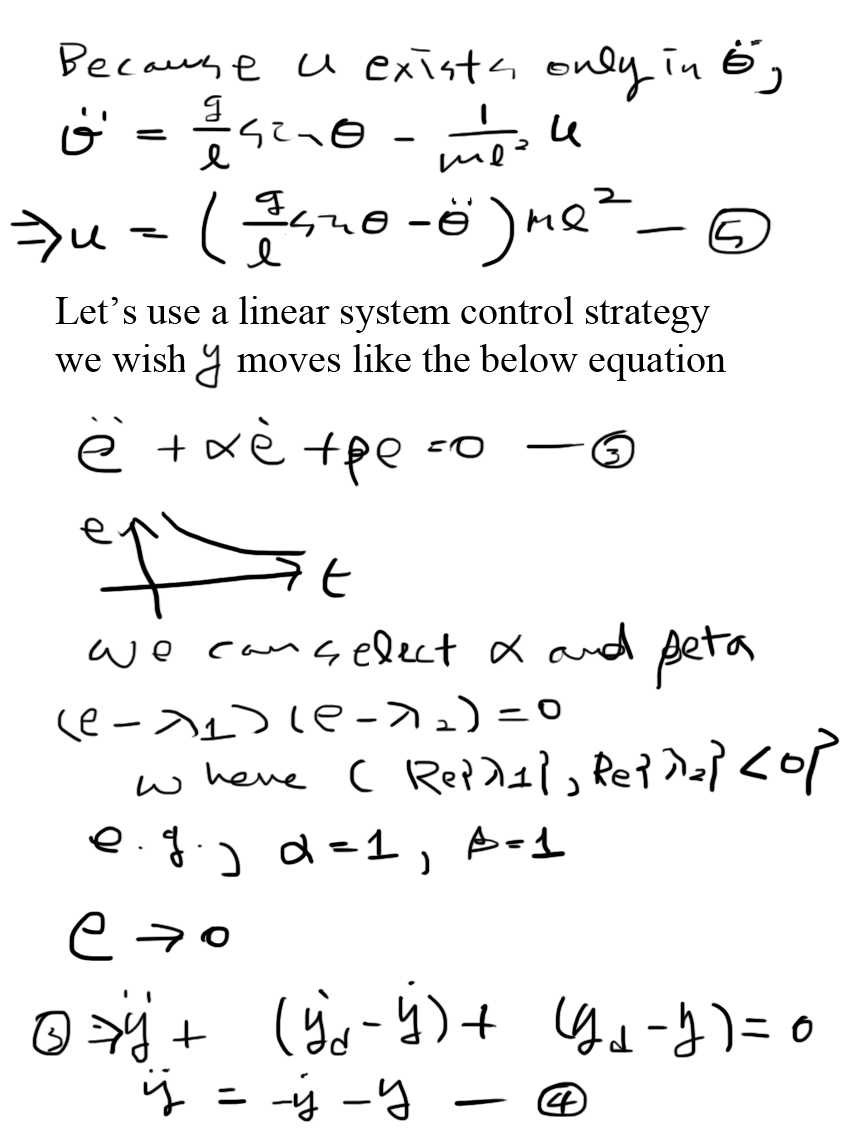

As we can see from the inverted pendulum example. nonlinear part can be canceled by control input. I wish it can help your understanding. If you have any question or need any help, leave a reply.
—————————————————————————————————————————–
I am Youngmok Yun, and writing about robotics theories and my research.
My main site is http://youngmok.com, and Korean ver. is http://yunyoungmok.tistory.com.
—————————————————————————————————————————–

