
Hill Type Muscle Model with Matlab Code
In this post, I will write on the Hill type muscle model, and then, I will provide a Matlab code made for the model.
If you have a basic knowledge about the muscle tendon unit, and just want to download the Matlab code, just download from the following links
<Matlab m code> or <Matlab Simulink block>.
If you are familiar with Biomechanics, I think the best source to study a muscle tendon model is Zajac’s paper [4].
OK let’s go to the main writing.
Generally, the muscle tendon unit is modeled by the below figure including a CE (controctile component element), PE (parallel elastic element), and SE (series elastic element). This is the Hill type muscle-tendon model. The CE and PE are elements for a muscle, and the SE is for a tendon. Sometimes the SE is ignored in modeling, depending on tendon type, because its stiffness is very high.
![hill type muscle model [1], Hill Type Muscle Model with Matlab Code](https://i0.wp.com/youngmok.com/wp-content/uploads/2013/11/hill_type_muscle_model.png)
hill type muscle model [1]
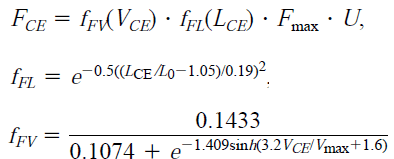
Force function of CE [2]
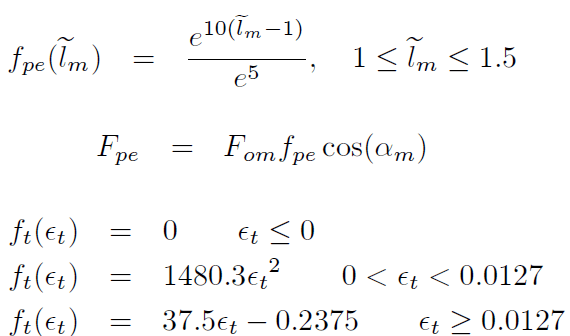
Force of PE and SE [5]
Finally, we can make a model based on the above equations. In my code, I made a muscle-tendon model for finger muscles. If you want to model for the other muscle tendon unit, you have to search several parameters for the muscle.
You can download the Matlab code and Simulink code from below link. I made the same function with two different ways for user’s convenience.
<Matlab m code> or <Matlab Simulink block>.
—————————————————————————————————————————–
I am Youngmok Yun, and writing about robotics theories and my research.
My main site is http://youngmok.com, and Korean ver. is http://yunyoungmok.tistory.com.
—————————————————————————————————————————–