Simple Example Using shared variable in QT multi-thread with QMutex
Today, in this post, I want to share my simple example code to explain how to use shared variables in QT multi-thread environments with QMutex.
In the example, first I will generate an Int variable to be shared.
Then, I will make two threads. Each thread has their own ID. and they will try to change the shared number with their ID number.
After changing the shared number in their threads to be same with its ID, the thread will check if the shared number is really same with the ID. If the other thread changes the shared variable just before the check, it will print out an error message.
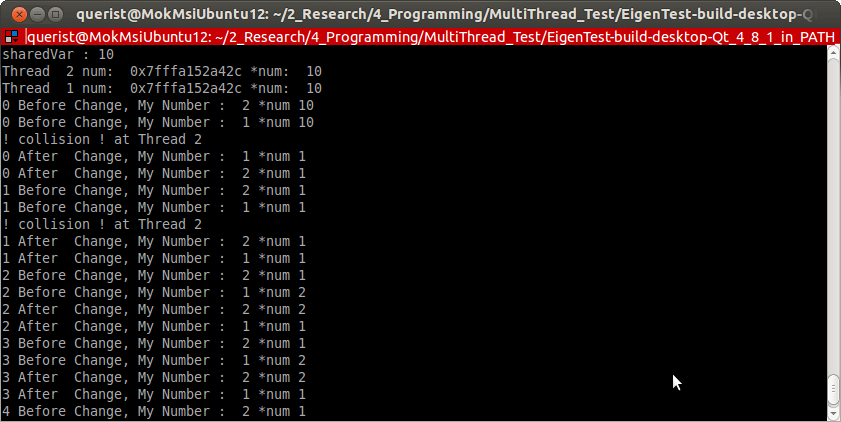
Without Mutex, it will give us many error message, and with Mutex, we can remove this collision error.
You can download full package of source code from here <Download>.
Also, you can just see and understand by watching the below codes and results with or without Mutex.
main.cpp
#include <QtCore/QCoreApplication>
#include "mythread.h"
int main(int argc, char *argv[])
{
QCoreApplication a(argc, argv);
QMutex mMutex;
int sharedVar=10;
qDebug() << "sharedVar :"<< sharedVar;
MyThread mThread1(&mMutex,1,&sharedVar);
MyThread mThread2(&mMutex,2,&sharedVar);
mThread1.start();
mThread2.start();
return a.exec();
}
mythread.h
#ifndef MYTHREAD_H
#define MYTHREAD_H
#include <QtCore>
#include <QMutex>
class MyThread : public QThread
{
private:
QMutex* mutex;
public:
MyThread(QMutex* mu, int myNum, int* sharedNum);
int myNumber;
int* num;
protected:
void run();
};
#endif // MYTHREAD_H
mythread.cpp
#include "mythread.h"
#include <QtCore>
#include <QDebug>
#include <QMutexLocker>
MyThread::MyThread(QMutex* mu, int myNum, int* sharedNum)
{
mutex= mu;
myNumber = myNum;
num = sharedNum;
}
void MyThread::run(){
qDebug() << "Thread " << myNumber << "num: " << num << "*num: " << *num;
for (int i=0;i<5;i++){
mutex->lock(); // To avoid collision
qDebug() << i << "Before Change, My Number : "<< myNumber << "*num" << *num ;
(*num) = myNumber;
usleep(10);
if ( *num != myNumber ){
qDebug() << "! collision ! at Thread" << myNumber ;
}
qDebug() << i << "After Change, My Number : "<< myNumber << "*num" << *num ;
mutex->unlock(); // Let's release the lock
usleep(1);
}
}
QMutexTest.pro
QT += core
QT -= gui
CONFIG += console
SOURCES += main.cpp \
mythread.cpp
HEADERS += \
mythread.h
Result ( with Mutex)

Result ( If I remove mutex part)
I wish everybody understands this one. If you want to study more deeply, I recommend to read this post. http://stackoverflow.com/questions/8971168/how-to-use-qmutex
If you cannot understand, please leave me a reply.
—————————————————————————————————————————–
I am Youngmok Yun, and writing about robotics theories and my research.
My main site is http://youngmok.com, and Korean ver. is http://yunyoungmok.tistory.com.
—————————————————————————————————————————–
Like this:
Like Loading...
















{kind=link}