I hope this Matlab code for numerical Hessian matrix helps your projects
This Matlab code is based on another Matlab function, NumJacob, which calculates a numerical Jacobian matrix. If you are interested in this, visit here.
If you want to know the theory on Hessian matrix, please read this Wiki.
I acknowledge that this code is originally made by Parviz Khavari, a visitor of this blog, and I modified to post here.
In this post, I am sharing how to compile a C code generated by Matlab C coder with GCC compiler. Let me explain with an example.
1. Generating a C code with Matlab C coder.
I will use a very simple Matlab code, and the below is the code
function y = add_coder(a,b) y=a+b
With the Matlab C coder, let’s auto-generate the C code. You have to specify the types of variables and some other options. If you just read the dialog box, it might not be difficult.
As a result, you can see this kind of result. If your Matlab version is not 2015, it might be little different, but its big flow is almost same.
2. Let’s compile the code generated by Matlab C coder
This is my main.cpp file that is modified from the auto-generated main.cpp by Matlab C coder
#include "rt_nonfinite.h"
#include "add_coder.h"
#include "add_coder_terminate.h"
#include "add_coder_initialize.h"
#include "stdio.h"
int main()
{
/* Initialize the application.
You do not need to do this more than one time. */
add_coder_initialize();
/* Invoke the entry-point functions.
You can call entry-point functions multiple times. */
double a=10;
double b=20.0;
double y;
y = add_coder(a, b);
printf("y: %lf\n",y);
/* Terminate the application.
You do not need to do this more than one time. */
add_coder_terminate();
return 0;
}
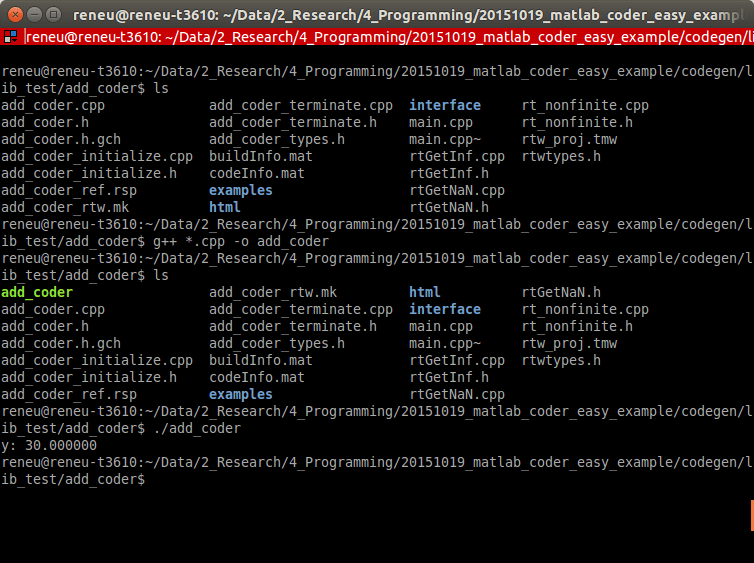
I located this main.cpp file with other all codes.
Now let’s compile all codes. Just compile main.cpp with all other cpp files. like this.
I am attaching all related files as a zip file. <Download>
I am sharing a Matlab code to get a vertex angle from three points.
This is the code, and you can download this one from here <Download>
function [ang] = get_vertex_ang_from_three_points(p0,p1,p2)
% get the vertex angle at p0 from three points p0,p1,p2 % p0, p1,p2 are two dim vector % %%% example % p0=[0;0];p1=[1;0];p2=[0;1]; % get_vertex_ang_from_three_points(p0,p1,p2) % answer = 1.57 (45 deg) %%%
v1 = p1-p0; v2 = p2-p0; ang = acos(v1′v2/(norm(v1)norm(v2)));
It is very easy to use. you can get the vertex angle from three points, It is written in Matlab code
In this post, I will explain how to derive a dynamic equation with Lagrange Equation by MATLAB with Examples. As an example, I will derive a dynamic model of a three-DOF arm manipulator (or triple pendulum). Of course you may get a dynamic model for a two-DOF arm manipulator by simply removing several lines. I am attaching demo codes for both two and three DOF arm manipulators.
If you know all theories and necessary skills and if you just want source code, you can just download from here.
In the attached file, “Symb_Development_3DOF.m” generates a dynamic model. “main_sim_three_dof_arm.m” runs a simulation. You may get a result like this.
1. Example system
Let’s suppose a three DOF arm manipulator shown in the below figure. I am assuming all of masses (M1, M2, M3) exist at the end of links for simplicity. Three actuators exist at each joint, and directly actuate the torques (u1,u2,u3). The manipulator kinematics is governed by three joint angles (q1, q2, q3).
three DOF arm manipulator
2. Theoretical Background
We will get a dynamic equation of this system by using Lagrangian mechanics. If you do not have a background knowledge of Lagrangian mechanics, please refer here.
The general dynamic equation is obtained by
Where, T is the total kinetic energy, V is the total potential energy of the system. where is the generalized force, t is time, is the generalized coordinates, is the generalized velocity. For the example of three-DOF arm manipulator problem, is the torque at the j-th joint, is the angle of the j-th joint, is the angular velocity of the j-th joint.
3. Using Matlab symbolic toolbox
First, let’s define the symbols.
I am using x to represent q, xd for , xdd for L is the length of each link. u is the torque of each joint. g is the gravity constant.
In the attached file, “Symb_Development_3DOF.m” generates a dynamic model. “main_sim_three_dof_arm.m” runs a simulation. Then, you can get this result.
So far, I have explained how to derive a Lagrange Equation by MATLAB with Examples.I hope that this post helps your project and save your time. Please leave a message if you have any question.
Update on 02/21/2016
I updated some code and posting about typo. “simple” -> “simplify” There is no function “simple” Now all programs are running well.
I am sharing the minimal C++ class for Maxon EPOS2. It includes a basic “initialization”, “Move”, “Read position”, “Close device” functions. The program consists of a class called “cmaxonmotor”. You can download the class and demo program here
#include <stdio.h>
#include <iostream>
#include "cmaxonmotor.h"
using namespace std;
int main(int argc, char *argv[])
{
CMaxonMotor motor("USB0",1);
motor.initializeDevice(); // initialize EPOS2
long TargetPosition = -200000;
int CurrentPosition = 0;
motor.Move(TargetPosition); // move to the target position
cout << "Press <Enter> to stop and quit..." << endl;
getchar();
motor.GetCurrentPosition(CurrentPosition); // get the current position
cout << "Current Position: " << CurrentPosition << endl;
motor.closeDevice(); // close EPOS2
return 0;
}
You can control one motor just via USB, and also able to control multiple motors via USB-CAN gateway. For this version, see this article.
I have tried to find a simple birectional UDP program, but it was not easy. Most of programs were incomplete. So I made the thinnest program for only bidirectional UDP communication.
The program is based on the examples provided by NI.
You can download the program at <Download>. The below is screenshots of the program.